



댓글 0
기사입력 : 2023.09.20 11:45:00
- 파스타 모양 엘라스토머 리본 로봇, 열 감지로 작동
- 비대칭 디자인으로 자유자재 움직임 가능

미로를 탐색할 수 있는 뇌가 없는 소프트 로봇이 탄생했다.
과학 전문 매체 뉴로사이언스에 의하면, 노스캐롤라이나 주립대학(NCSU)의 연구원들은 물리적 지능을 사용해 미로와 같은 복잡한 환경을 자율적으로 탐색할 수 있는 '뇌 없는' 소프트 로봇을 설계했다.
NCSU가 유튜브를 통해 공개한 '뇌 없는' 소프트 로봇의 모습은 팔이나 다리 머리가 없으며, 나선형 파스타 '로티니(Rotini)'를 연상시키는 정교하게 꼬인 생소한 이미지로 눈길을 사로잡았다.
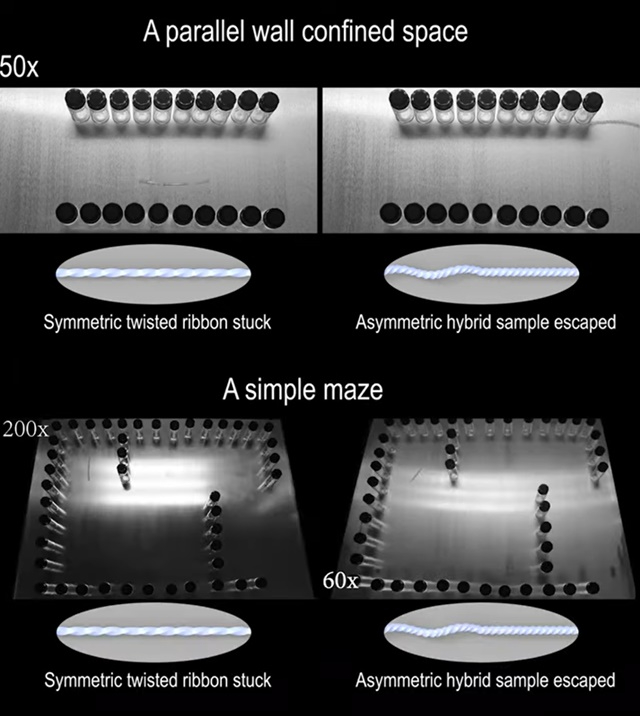
이전 모델과는 달리 이 로봇은 장애물이 없어도 자체적으로 회전할 수 있다. 이러한 독특한 움직임은 한쪽 절반이 지면에 더 많은 힘을 가하도록 설계된 비대칭적인 디자인 덕분이다. 그로 인해 이 로봇은 둥글게 호를 그리며 움직이고 동적 미로를 횡단하며 평행한 물체 사이에 끼이지 않고 피해 갈 수 있다.
이 소프트 로봇은 '물리적 지능'을 통해 작동한다. 이는 구조적 설계와 재료에 따라 동작이 결정되므로 컴퓨터나 사람의 지시가 필요하지 않다. 이 로봇은 리본 모양의 '액정 엘라스토머'로 만들어져 있으며, 주변 공기보다 더 뜨거운 표면에 놓이면 움직이기 시작한다. 표면이 더 뜨거울수록 로봇은 더 빨리 움직인다.
역동적인 환경 탐색 가능
이 연구팀은 인간이나 컴퓨터의 지시 없이 간단한 미로를 탐색할 수 있는 소프트 로봇을 이미 제작했다. 이들은 이제 그 작업을 기반으로 더 복잡하고 역동적인 환경을 탐색할 수 있는 '두뇌가 없는' 소프트 로봇을 만들었다.
'뇌 없는' 소프트 로봇에 관한「물리적으로 지능적인 자율 로봇 미로 탈출기」라는 논문은 사이언스 어드밴스(Science Advances) 저널에 지난 8일 게재됐다. 이 연구는 국립과학재단(National Science Foundation)이 지원했다.
이 논문의 공동 저자이자 노스캐롤라이나 주립대학교 기계 및 항공우주 공학부의 지에 인(Jie Yin) 교수는 "우리의 초기 연구에서 소프트 로봇이 매우 간단한 장애물 코스를 통해 비틀거나 돌릴 수 있다는 것을 보여주었다"며 "그러나 이전 모델은 장애물에 부딪히지 않으면 회전하지 못했다. 실용적인 측면에서 이는 로봇이 때때로 평행한 장애물 사이에 갇혀서 앞뒤로 튕길 수 있음을 의미한다"고 말했다.
그는 "이번에 우리는 스스로 회전할 수 있는 새로운 소프트 로봇을 개발했다. 이 로봇은 구불구불한 미로를 통과할 수 있으며, 움직이는 장애물을 우회할 수도 있다. 이런 모든 행동은 컴퓨터의 안내가 아닌 물리적 지능을 사용해서 이루어진다"고 설명했다.
여기서 물리적 지능은 소프트 로봇과 같은 역동적인 물체를 말하며, 그 동작은 컴퓨터나 인간의 개입으로 지시되지 않고 구조 설계와 구성 재료에 의해 제어되는 것을 의미한다.
온도에 반응하는 로봇
새로운 소프트 로봇은 이전 버전과 마찬가지로 리본 모양의 액정 엘라스토머로 제작됐다. 이 로봇을 주변 공기보다 뜨거운 섭씨 55도(화씨 131도) 이상의 표면에 놓아두면 움직이기 시작한다. 작동 원리는 표면에 닿는 리본 부분은 수축하지만 공기에 노출된 리본 부분은 수축하지 않는 것을 이용했다. 이것은 롤링 모션을 유도하며 표면이 따뜻할수록 로봇이 더 빨리 굴러간다.
이전 버전의 소프트 로봇은 대칭 디자인이지만 새 로봇에는 두 개의 별개의 반쪽이 있다. 다시 말하면, 로봇의 절반은 직선으로 뻗어 있는 꼬인 리본 모양이고 나머지 절반은 나선형 계단처럼 더 촘촘하게 꼬인 리본 모양이다.
이 비대칭적인 디자인 때문에 로봇의 한쪽 끝이 다른 쪽 끝보다 표면에 더 많은 힘을 가할 수 있다.
연구진은 바닥보다 입구가 넓은 플라스틱 컵을 예로 들었다. 이 컵은 테이블을 가로질러 굴리면 직선으로 구르지 않고 둥글게 호를 그리며 굴러가는 데, 컵이 비대칭적인 모양을 하고 있기 때문이다.
비대칭 디자인이 특징
논문의 제 1 저자이자 NCSU의 야오 자오(Yao Zhao) 연구원은 "우리의 새로운 로봇이 탄생한 배경에 있는 개념은 꽤 간단하다. 비대칭적인 디자인 덕분에 물체에 접촉하지 않고도 회전할 수 있다"고 말했다.
그는 "따라서 물체와 접촉할 때는 방향을 바꾸어 미로를 탐색할 수 있지만 평행한 물체 사이에 갇히지는 않는다. 대신, 호를 그리며 움직일 수 있는 능력은 본질적으로 자유롭게 움직일 수 있게 해준다"고 설명했다.
연구진은 비대칭 소프트 로봇 설계가 움직이는 벽이 있는 미로를 포함하여 더 복잡한 미로를 탐색하고 신체 크기보다 좁은 공간을 통과할 수 있는 능력 등을 테스트했다.
더 나아가 이들 연구원은 새로운 로봇 디자인을 서로 다른 환경인 금속 표면과 모래에서도 테스트했다. Yin은 "이 작업은 소프트 로봇 설계에 대한 혁신적인 접근법을 개발하는 데 도움이 되는 또 다른 진전이다. 특히 소프트 로봇이 환경에서 열에너지를 얻을 수 있는 응용 프로그램에 대한 것이다"라고 말했다.
로봇이 사람처럼 머리가 있고 팔과 다리가 있어야 한다는 선입견을 깬 이번 연구는 다양한 형태의 무궁무진한 로봇의 탄생을 예고했다.

전체댓글 0
